
Diseñan un controlador que permite a un robot imitar la neuromecánica humana y adaptar su comportamiento
Investigadores de la Universidad de Granada y del École Polytechnique Fédérale de Lausanne (Suiza) desarrollan este avance que puede tener implicaciones en el ámbito sanitario, la industria y la agricultura, entre otros sectores. Este trabajo fusiona neurociencia y biomecánica para desarrollar un controlador capaz de ajustar el comportamiento motor de un robot. El objetivo es que los robots puedan adaptar su funcionamiento a las exigencias del entorno en que se mueven.
Fuente: Universidad de Granada
Científicos del Departamento de Ingeniería de Computadores, Automática y Robótica de la Universidad de Granada lideran el diseño de un controlador que combina un modelo computacional de cerebelo con un modelo computacional muscular para coordinar el movimiento de un brazo robótico. Este trabajo fusiona neurociencia y biomecánica para desarrollar un controlador capaz de ajustar el comportamiento motor de un robot. El objetivo es que los robots puedan adaptar su funcionamiento a las exigencias del entorno en que se mueven y a los requisitos de las tareas que ejecutan.
El prototipo de músculo replica las propiedades viscoelásticas características de la biomecánica muscular.
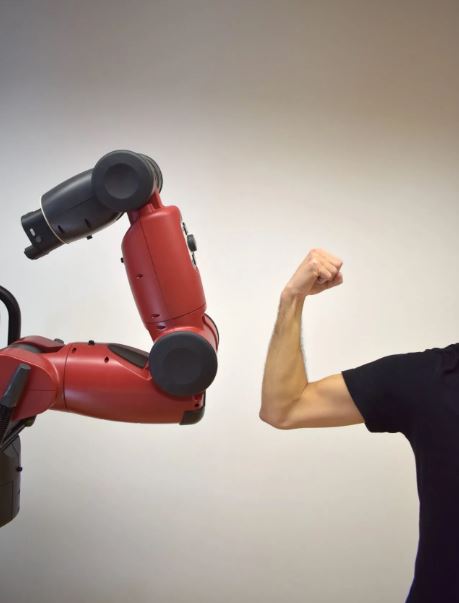
“No es lo mismo levantar una maceta que manipular un huevo. La primera tarea exige rigidez en nuestras articulaciones, mientras que para la segunda necesitamos movimientos mucho más suaves. Gracias a la combinación del sistema nervioso y la biomecánica del cuerpo, ajustamos nuestros movimientos según el contexto y cubrimos un espectro amplio de comportamiento motor”, explica Ignacio Abadía Tercedor, investigador principal de este trabajo. Los estudios en robótica tratan precisamente de copiar esa versatilidad en el comportamiento.
El modelo de cerebelo desarrollado permite aprender cómo controlar el brazo del robot. “Igual que nosotros vamos aprendiendo a coordinar nuestro cuerpo desde que somos pequeños, el modelo de cerebelo aprende desde cero y poco a poco a gestionar el brazo robótico para realizar distintos movimientos”, detalla Ignacio Abadía.
El prototipo de músculo, por su parte, replica las propiedades viscoelásticas características de la biomecánica muscular, y también incluye cocontracción variable y una respuesta refleja basada en la médula espinal. Ajustando la cocontracción muscular (la activación simultánea de los músculos agonistas y antagonistas que mueven una articulación) se cambia la rigidez del brazo del robot, igual que el movimiento con las articulaciones.
Combinando ambos modelos, los investigadores logran que el brazo robótico ajuste su comportamiento según el contexto: si hace falta mayor precisión y mayor rigidez, el robot aumenta la cocontracción; si hacen falta movimientos más suaves que permitan, por ejemplo, interacciones seguras con humanos, el robot minimiza su rigidez utilizando niveles bajos de cocontracción.
Ignacio Abadía, Eduardo Ros y Niceto R. Luque son los investigadores de la Escuela Técnica Superior de Ingenierías Informática y de Telecomunicación de la UGR que participan en este trabajo.
Referencia:
Ignacio Abadía et al., ‘A neuromechanics solution for adjustable robot compliance and accuracy’. Sci. Robot.10,eadp2356(2025).
Últimas publicaciones

Un equipo internacional de investigación liderado por la Universidad de Almería ha datado estas grandes formaciones geológicas y han confirmado que pueden emplearse como ‘archivos naturales’ para reconstruir las condiciones climáticas de hace cientos de miles de años.
Sigue leyendo
Un equipo de investigación de la Universidad de Cádiz ha entrenado un algoritmo para identificar automáticamente los sonidos de delfines en un entorno acústico complejo. El objetivo es facilitar su seguimiento científico y mejorar el análisis del paisaje sonoro marino en una de las zonas con mayor tráfico marítimo del mundo.
Sigue leyendo
Un equipo de investigación de la Universidad de Sevilla ha diseñado in vitro, en el laboratorio, un agente a escala nanométrica para transportar y dosificar de forma controlada rutenio, un compuesto con capacidad para combatir bacterias. La propuesta ofrece una alternativa a los tratamientos convencionales y permite que el fármaco actúe sólo cuando alcanza su objetivo, reduciendo su degradación y posibles efectos no deseados.
