
Un escenario virtual 3D para entrenar a robots ‘sabuesos’ de gases
Fuente: Carolina Moya / Fundación Descubre
Los robots olfativos son dispositivos móviles que incluyen sensores como cámaras y láseres a los que se suman una ‘nariz electrónica’, es decir, un sistema para detectar y analizar la composición química del aire que lo rodea. Además incorpora un anemómetro para medir la dirección que sigue esa masa gaseosa. Esas herramientas le permiten acometer tres tareas: distinguir cual es el gas, generar un mapa para estimar cómo se ha distribuido y buscar la fuente de emisión.

El investigador Javier Monroy, autor principal del estudio GADEN
No obstante, la dificultad al trabajar con estas plataformas es comprobar si cumplen con su función, ante la imposibilidad de ver la dispersión del gas. El simulador ideado por los expertos malagueños responde a este obstáculo. “Es complicada la experimentación con robots de detección de gases, ya que no tenemos un sistema para ver cómo evoluciona la masa del gas emitido. Para desarrollar plataformas con capacidad olfativa es necesario que emulen las condiciones reales”, explica a la Fundación Descubre el investigador Javier Monroy, uno de los autores del estudio ‘GADEN: A 3D Gas Dispersion Simulator for Mobile Robot Olfaction in Realistic Environments’, publicado en la revista Sensors.
La novedad del simulador estriba en la posibilidad de fusionar en una misma aplicación la actividad del robot y cómo se dispersa el gas, permitiendo con ello simular la respuesta de los sensores que porta el dispositivo robótico de forma precisa. A esto se suman otras ventajas como su diseño 3D, que aumenta el realismo y su implementación sobre la plataforma robótica ROS, la más extendida entre los desarrolladores.
Matemáticas y viento
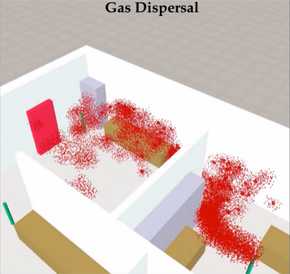
Pluma de dispersión del gas (puntos rojos) en un entorno 3D
El simulador está basado en algoritmos matemáticos. Por un lado, incorpora teoría de dinámica de fluidos para la estimación de las condiciones del viento en un entorno en tres dimensiones. Sobre éste, los expertos utilizan teoría de filamentos para emular la dispersión de los gases. “Con esta combinación obtenemos las condiciones de viento y el estado de la dispersión de los gases, para cualquier fuente de emisión a considerar en el entorno”, apunta Monroy.
Para comprobar la exactitud del simulador, los expertos comparan los modelos matemáticos con datos reales obtenidos en diversas pruebas en un túnel del viento. “Comparamos la dispersión real en el entorno y la de nuestro sistema. Así hacemos la comparación cuantitativa y cualitativa”, relata.
Una de la ventajas del simulador propuesto es su versatilidad da la hora de simular desde entornos simples, como es el caso de una habitación vacía donde los gases se dispersan en forma pluma, hasta entornos sumamente complejos y más realistas, como sería una oficina con distintas estancias y mobiliario. “Los obstáculos presentes no solo condicionan cómo el robot puede moverse en el entorno, afectan a la forma de dispersión de los gases. Por ello, cuantos más detalles se introduzcan en el simulador, más realistas serán los datos obtenidos”, explica.
Olfato artificial

El dispositivo fusiona los simuladores robóticos con los de fluidos, permitiendo en un mismo entorno disponer de dispersión de gases y sensores montados en una plataforma robótica.
Los robots desarrollados por los expertos malagueños incorporan diferentes sensores, entre los que se encuentra la nariz electrónica, un dispositivo de olfato artificial que permite distinguir y reconocer diferentes gases, así como sus concentraciones. Esta tecnología le permite evaluar mezclas de gases, vapores y olores, con lo que resulta de gran interés para la industria química, catas olfativas y la industria de fabricación de componentes que necesiten ciclos rápidos de mediciones. En este contexto, el grupo de investigación MAPIR cuenta con varias patentes de narices adaptadas a su uso con robots móviles.
Según Monroy, la evolución de este tipo de plataforma pasa por incorporar sensores químicos que permanezcan estables en el tiempo, una de las principales limitaciones en la actualidad. En este sentido, apunta ya varios ámbitos de aplicación, como la monitorización de la polución ambiental en ciudades. “También en empresas que trabajen con sustancias químicas peligrosas como sistema de alerta para detectar escapes sin que se produzcan consecuencias en los trabajadores”, apunta el experto.
El simulador 3D para robots olfativos en entornos reales ha contado con la financiación de la consejería de Economía y Conocimiento de la Junta de Andalucía, la comisión europea y la Swedish Knowledge Foundation, KK-stiftelsen.
Referencia:
Monroy. J; Hernandez-Bennets V; Fan H.; Lilienthal A.; Gonzalez-Jimenez J. ‘GADEN: A 3D Gas Dispersion Simulator for Mobile Robot Olfaction in Realistic Environments’. Sensors. 2017 Jun 23;1 7(7). pii: E1479. doi: 10.3390/s17071479.
Imágenes:
Investigadores del grupo MAPIR de la Universidad de Málaga
https://www.flickr.com/photos/fundaciondescubre/34910573984/in/dateposted-public/
El investigador Javier Monroy, autor principal del estudio GADEN
https://www.flickr.com/photos/fundaciondescubre/34942078163/in/dateposted-public/
https://www.flickr.com/photos/fundaciondescubre/35364246710/in/dateposted-public/
Pluma de dispersión del gas (puntos rojos) en un entorno 3D
https://www.flickr.com/photos/fundaciondescubre/34910571934/in/dateposted-public/
GADEN tiene en cuenta el peso molecular de los gases simulados.
https://www.flickr.com/photos/fundaciondescubre/34910573044/in/dateposted-public/
El dispositivo fusiona los simuladores robóticos con los de fluidos, permitiendo en un mismo entorno disponer de dispersión de gases y sensores montados en una plataforma robótica.
https://www.flickr.com/photos/fundaciondescubre/34910574554/in/dateposted-public/
Más información:
FUNDACIÓN DESCUBRE
Departamento de Comunicación
Teléfono: 954232349. Extensión 540025
e-mail: comunicacion@fundaciondescubre.es
Últimas publicaciones

En su 17ª edición, esta actividad de divulgación científica contará con encuentros que abordarán el trío de eclipses, ciencia e inteligencia artificial, emergencias climáticas, Generación del 27 y enfermedades autoinmunes, entre otros temas. Asimismo, se celebrarán Cafés tertulias, en los que podrán participar un mayor número de asistentes que en el formato habitual. Se pueden solicitar por correo electrónico cafeconciencia@fundaciondescubre.es hasta el 31 mayo de 2027.
Sigue leyendo
Los incendios forestales desastres no solo perjudicarán la actividad y biodiversidad de áreas colindantes, sino también empeorarán la salud física y psicológica de sus habitantes. Varias investigaciones advierten de que la exposición al humo agrava patologías previas como el asma o la enfermedad pulmonar obstructiva crónica (EPOC) y puede aumentar la mortalidad prematura de población vulnerable.
Sigue leyendo
Esta investigación, liderada por la Estación Biológica de Doñana y realizada con mosquitos silvestres del sur de España, aporta nuevas claves sobre los factores que pueden influir en la capacidad de estos insectos para transmitir patógenos.
