
La Universidad Pablo de Olavide participa en un proyecto europeo de investigación sobre robótica urbana
Fuente: Universidad Pablo de Olavide
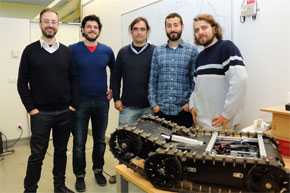 Un equipo de investigadores del área de Ingeniería de Sistemas y Automática de la Universidad Pablo de Olavide, de Sevilla, dirigido por el profesor Luis Merino Cabanas, participa en un proyecto de investigación financiado por la Comisión Europea con 550.000 euros para el desarrollo de robots para aplicaciones urbanas, concretamente un prototipo para la inspección de alcantarillas.
Un equipo de investigadores del área de Ingeniería de Sistemas y Automática de la Universidad Pablo de Olavide, de Sevilla, dirigido por el profesor Luis Merino Cabanas, participa en un proyecto de investigación financiado por la Comisión Europea con 550.000 euros para el desarrollo de robots para aplicaciones urbanas, concretamente un prototipo para la inspección de alcantarillas.
Este proyecto se engloba en la iniciativa “ECHORD++: The European Coordination Hub for Open Robotics Development”, en cuyo marco se financian proyectos de innovación tecnológica (PDTI en sus siglas inglesas) que buscan satisfacer necesidades expresadas por los grupos de interés, y en particular por entidades públicas.
Así, un consorcio formado por la Universidad Pablo de Olavide, de Sevilla, junto con la empresa portuguesa IDMind -líder del proyecto- y la Universidad de Sevilla, desarrollará un prototipo robótico para la inspección de alcantarillas en el marco del PDTI SIAR (Sewer Inspection Autonomous Robot). Este proyecto nace como respuesta a la necesidad expresada por la empresa pública Barcelona Cicle de l’Aigua, encargada de la gestión del alcantarillado de Barcelona. “Una parte de los más de 1.000 kilómetros de la red de alcantarillado de la ciudad es inaccesible por los operarios, por lo que el prototipo es de mucho interés”, subraya el investigador Luis Merino, quien añade que “el prototipo se probará en dicha red de alcantarillado, y esperamos que sus resultados sean extensibles a otras ciudades y aplicaciones relacionadas”.
El equipo de investigadores de la Escuela Politécnica Superior de la Universidad Pablo de Olavide de Sevilla se encargará de diseñar los “sentidos” del robot, de modo que éste pueda percibir obstáculos, realizar mapas en 3D y reconocer defectos en las alcantarillas. También diseñará el sistema de navegación del robot para que éste pueda explorar el sistema de alcantarillado de forma autónoma.
Con este proyecto, “el equipo de investigación -señala Luis Merino- potencia su línea robótica de servicio, que se ocupa del desarrollo de robots que ofrecen servicios fuera de las factorías, típicamente en entornos con humanos o como complemento de trabajadores”.
Más información:
http://echord.eu/2016/03/01/start‐pdti/
http://echord.eu/essential_grid/siar/
Últimas publicaciones
Un equipo de investigación de la Universidad de Málaga ha diseñado una estrategia de control para motores utilizados en movilidad eléctrica y aeronáutica. Esta técnica mejora la calidad de la corriente y predice el funcionamiento más adecuado, optimizando su eficiencia de consumo y respondiendo ante posibles fallos.

La comunidad tiene la oportunidad de realizar una evaluación previa este domingo para estimar la logística y seguridad necesarias de cara al evento astronómico que será visible en 115 localidades de Almería, Cádiz, Granada y Málaga.
Sigue leyendo
El programa de ocio estival de la Fundación Descubre estará presente en localidades de las provincias de Huelva, Sevilla, Málaga, Granada, Jaén y Almería.
Sigue leyendo