
Aplican un método matemático para que los robots actúen ante situaciones imprevistas
Un equipo de investigación de la Universidad de Málaga ha creado un algoritmo que mejora el rendimiento de los sensores de los autómatas. El sistema permite la integración inteligente de distintas bases de conocimiento, detecta posibles fallos en su percepción y reconstruye los datos para solventar los problemas en el momento.
Un equipo de investigación de la Universidad de Málaga ha aplicado un método de entrenamiento de robots que permite que el autómata detecte fallos de percepción en sus sensores y establezca nuevas rutinas para solucionarlos. Combina diversas fuentes de información, desde imágenes, bases de datos, conceptos y situaciones, para reconocer una circunstancia anómala o imprevista y reaccionar ante ella.
El modelo es aplicable a muchas áreas donde los robots pueden desarrollar su trabajo, desde agricultura hasta servicios. Especialmente en este último caso y cuando la máquina debe interactuar con personas, debe saber moverse con garantías en su entorno, anticipándose a situaciones anómalas como podría ser, por ejemplo, la aparición de una persona que se encuentre fuera del campo visual del robot o la evitación de objetos.

El robot ‘nace sabiendo’ porque un experto le ‘transfiere’ su conocimiento. No tiene que aprender, como ocurre con otros métodos de Inteligencia Artificial. Foto: Pixabay.
La manera de enseñar a las máquinas, en este caso, es similar al de un experto en cualquier materia ya que unifica distintas fuentes de experiencia y establece relaciones causa-efecto en la información que le va llegando. Así, se dota al robot del conocimiento necesario (humano, de intuición, técnico, etc.) para abordar los problemas y situaciones. En el artículo ‘Improving Bayesian inference efficiency for sensory anomaly detection and recovery in mobile robots’ de la revista Expert Systems with Applications los investigadores exponen cómo las decisiones del robot tienen en cuenta un mayor número de datos.
Además no los aborda de forma aislada, sino que los infiere y anticipa lo que sucederá atendiendo a las decisiones que tome. Así, podrá definir la mejor de las opciones entre distintas variables.
El sistema utiliza las conocidas como redes bayesianas, un método de inteligencia artificial basado en el conocimiento humano. Con él se podría explicar de una forma matemática la competencia de una persona sobre un tema. Al mismo tiempo, utilizando las relaciones y representaciones de este marco de aprendizaje, se puede hacer que el robot no sólo trate la información sino que domine cualquier materia al mismo nivel que un experto al utilizar fuentes heterogéneas y establecer relaciones causa-efecto entre los datos.
Así, por ejemplo, un robot de servicio podría interpretar en el pasillo de un hotel que una persona pueda salir de cualquiera de las puertas o, incluso, que esté situada detrás de él a pesar de que sus sensores no la hayan captado. En caso de que apareciera por sorpresa, el robot estaría preparado para adecuar su marcha a la circunstancia especial que se presente.
Con esta propuesta se resuelve una de las necesidades para que los robots móviles funcionen en entornos reales. Así, si un robot utiliza un láser para ubicarse en un lugar concreto, puede recibir información equivocada si se encuentra con un espejo o con cristales debido al reflejo o la refracción del rayo. Con el sistema, la máquina reconoce que hay una situación errónea y reconduce la información para una localización con mayores garantías. De esta manera, el autómata integra conocimiento humano y técnico que procede del propio sensor.
Uno de los principales resultados del estudio es la demostración de que los robots detectan fallos en sus sensores cuando son sometidos a condiciones adversas y reconstruyen los datos para buscar una solución. “En el desarrollo de tareas básicas como la localización, el mapeo y la navegación es fundamental que la máquina obtenga una percepción adecuada del entorno. Además, debe ser capaz de identificar y superar de manera inteligente y eficiente situaciones anormales”, indica a la Fundación Descubre el investigador de la Universidad de Málaga Manuel Castellano, autor del artículo.

El investigador de la Universidad de Málaga Manuel Castellano, autor del artículo.

Juan Antonio Fernández, otro de los autores del artículo, junto al robot utilizado en los ensayos.
Robots que ‘nacen sabiendo’
La propuesta ha sido evaluada en varias simulaciones ficticias y también ha sido probada en un entorno real con un robot móvil. Los resultados obtenidos muestran que logra un mejor rendimiento y precisión en comparación con otros métodos existentes, al tiempo que mejora la robustez de todo el sistema sensorial.
Incluso en situaciones con información abstracta son capaces de captar la información exterior y relacionarla con la que ya contiene, adaptando sus decisiones a las nuevas necesidades. “El robot ‘nace sabiendo’ porque un experto le ‘transfiere’ su conocimiento, por tanto no tiene que aprender, como ocurre con otros métodos de Inteligencia Artificial”, añade el investigador.
La base del método se encuentra en las redes bayesianas que unifican la teoría de grafos y la de la probabilidad. La parte de teoría de grafos es la que permite expresar relaciones causa-efecto entre las variables del problema. Por otro lado, la teoría de probabilidad aporta información sobre la incertidumbre en dichas relaciones. La unión de todo esto es lo que representa conocimiento con todas las opciones y posibilita programarlo en la máquina.
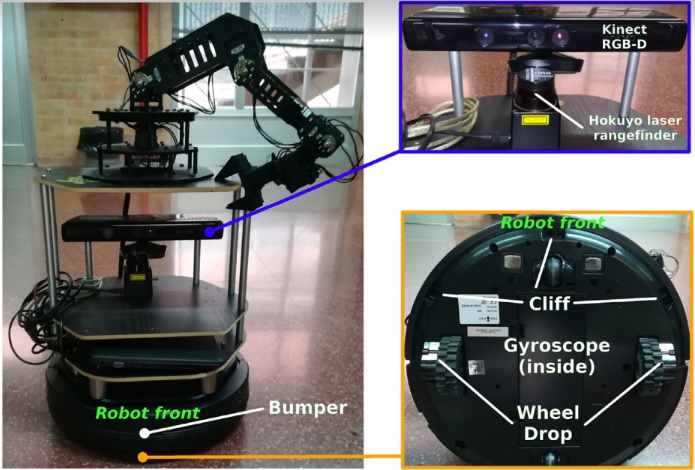
Vista frontal del robot móvil CRUMB, utilizado en este trabajo, con sus sensores.
El sistema aún tiene que mejorar los tiempos de respuesta ya que requiere de un procedimiento computacional complejo. En una situación real el robot no puede tardar mucho en tomar una decisión alternativa. Aunque los expertos han mejorado el algoritmo para que el proceso de deducción sea más eficiente continúan trabajando para optimizarlo.
Este trabajo ha sido financiado mediante el proyecto ‘Hacia equipos resilientes de manipuladoras UGV y UAV para tareas robóticas de búsqueda y rescate’ del Ministerio de Ciencia e Innovación y fondos propios de la Universidad de Málaga.
Referencias
Manuel Castellano Quero, Juan Antonio Fernández Madrigal y Alfonso García Cerezo. ‘Improving Bayesian inference efficiency for sensory anomaly detection and recovery in mobile robots’. Expert Systems with Applications. 2021
Más información:
#CienciaDirecta, agencia de noticias de ciencia andaluza, financiada por la Consejería de Transformación Económica, Industria, Conocimiento y Universidades de la Junta de Andalucía.
Teléfono: 958 63 71 99
Documentación adicional
Manuel Castellano, investigador de la UMA y autor del artículo
Juan Antonio Fernández, coautor del artículo, junto al robot utilizado en los ensayos
Últimas publicaciones

Coordinada por Descubre- Consejería de Universidad, Investigación e Innovación, en esta actividad un científico andaluz se sienta con un grupo reducido de invitados a conversar alrededor de una mesa mientras disfrutan de un desayuno. El objetivo de este proyecto es despertar vocaciones científicas entre los jóvenes, acercar la figura del investigador a la sociedad, dar a conocer los trabajos científicos que se realizan en Andalucía y aumentar el interés por la ciencia y la tecnología de la ciudadanía.
Sigue leyendo
Un equipo de investigación de la Universidad de Sevilla ha diseñado un material biodegradable de origen marino que actúa como una reserva hídrica en el suelo. La formulación combina resistencia y capacidad para absorber hasta 60 veces su peso en agua, por lo que podría emplearse para mantener el terreno húmedo y reducir la pérdida de nutrientes en suelos agrícolas sometidos a condiciones de sequía.

El Patronato de la institución, promovida por la Consejería de Universidad, Investigación e Innovación, aprueba las cuentas del ejercicio 2025 y la Memoria de Actividades del mismo periodo. La Fundación Descubre consolida su labor divulgativa en 2025, logra un impacto presencial de más de 266.000 personas y fortalece su acción con más de 390 alianzas.
Sigue leyendo