
Desarrollan un sistema que mejora la localización de flotas de vehículos
Un equipo de investigación de la Universidad de Sevilla ha validado una fórmula matemática con la que se reducen los tiempos de cálculo y se amplía la precisión de comunicación en grupos de vehículos. Esta novedad es aplicable a los sistemas actuales de vigilancia de empresas de paquetería y transporte o de navegación, por ejemplo
Un equipo de investigación de la Universidad de Sevilla ha validado la aplicación de un algoritmo que supervisa un conjunto de vehículos con el que se consigue una mayor precisión de la información obtenida y una mejor coordinación en menos tiempo que con otros modelos habitualmente usados.
Para coordinarse entre sí, los vehículos utilizan una red de sensores con los que se localizan y comunican. Además, realizan estimaciones dependiendo de los factores ambientales para modificar su comportamiento si fuera necesario. Así, los expertos han confirmado en el artículo ‘Multi-vehicle localization by distributed MHE over a sensor network with sporadic measurements: Further developments and experimental results’ publicado en la revista Control Engineering Practice que el algoritmo que proponen para gestionar la estimación y análisis de los datos que se reciben lo realiza de una manera más rápida y precisa.

El catedrático de la Universidad de Sevilla Eduardo Fernández Camacho, autor del artículo. Imagen: Flickr STCE Universidad de Sevilla.
La localización de sistemas de múltiples vehículos (MVS) se utiliza para mejorar la coordinación y eficiencia en una variedad de aplicaciones. Por ejemplo, en navegación permite que varios vehículos se muevan juntos en una formación coordinada. Esto es especialmente útil en situaciones como la exploración subacuática o la búsqueda y rescate. En el control de flotas, también se usa para monitorear la ubicación en tiempo real y coordinar operaciones, como la entrega de paquetes o el transporte de mercancías y así realizarlos de manera más rápida y eficiente que con un solo vehículo.
Para rastrear este tipo de flotas, es necesario que cada vehículo tenga acceso a la información de localización de los demás. Esto se muestra claro en la coordinación que debe existir, por ejemplo, entre dos coches de reparto para asegurar la entrega en fecha. “Sin embargo, debido a los límites de computación y comunicación de los sensores, no siempre es posible. Por lo tanto, es necesario establecer mecanismos para que cada uno realice su propia estimación de las circunstancias y la comunique al resto”, indica a la Fundación Descubre el investigador de la Universidad de Sevilla Eduardo Fernández Camacho, autor del artículo.
Autónomos para moverse unidos
Hasta el momento, la limitación de los modelos utilizados se basa en los tiempos de cómputo y en los fallos en la comunicación entre los sensores y los vehículos. La respuesta que ofrecen los investigadores ante este problema es el uso de un enfoque conocido como Estimación de Horizonte Móvil Distribuida (EHMD), una técnica de procesamiento de señales utilizada en sistemas de comunicación inalámbrica. Este modelo mejora la calidad de la señal recibida en un entorno en el que confluyen distintas antenas receptoras y transmisoras. Así, si los canales cambian en un tiempo determinado, el sistema se adapta, reduce interferencias, atenúa señales que no sean necesarias o amplía las requeridas.

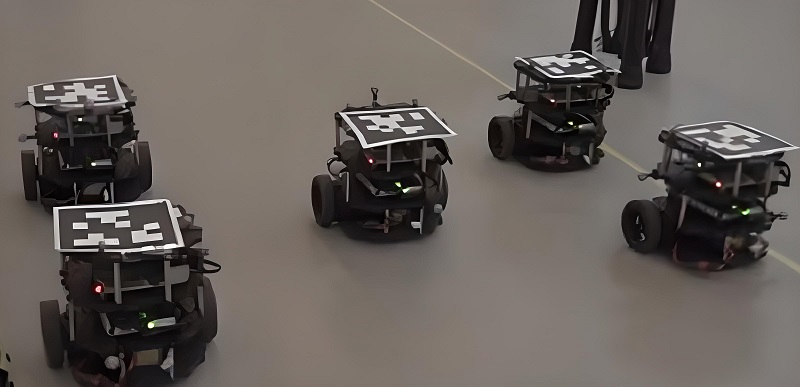
Cada vehículo y sensor de la red colaboran en la estimación de la localización de los demás.
De esta manera, cada vehículo y sensor de la red colaboran en la estimación de la localización de los demás. Esto hace que el sistema sea más robusto ante posibles fallos. Además, el algoritmo implantado evita que sean necesarios grandes recursos para los cálculos y la comunicación. De hecho, las pruebas realizadas han confirmado su efectividad en cámaras de bajo coste.
Circuito cerrado
Los ensayos se han realizado en un circuito cerrado equipado con un sistema de captura de movimiento. Plantearon tres escenarios diferentes para localizar cinco robots no cooperativos, es decir, que no se comunican entre ellos directamente. Cada prueba contaba con un número de cámaras concreto, 6 ó 12, con un campo de visión determinado, más o menos amplio, y una tipología de comunicación distinta.
Las cámaras estáticas, miden con los sensores de movimiento la posición de los vehículos de manera esporádica y transmiten la información a las computadoras que procesan la información y ofrecen una orden a cada vehículo de manera independiente. El algoritmo utilizado logra que los tiempos de cálculo y la precisión en la orden sean más eficientes que con otros modelos. La configuración experimental está disponible en este video.
El modelo que proponen mejora la calidad de la señal recibida en un entorno en el que confluyen distintas antenas receptoras y transmisoras.
Los expertos continúan sus ensayos para ampliar la capacidad de cómputo del algoritmo, así como nuevos escenarios que entrenen el sistema y permita su aplicación a distintos ámbitos, como el marítimo o la gestión de naves no tripuladas.
La investigación se ha financiado mediante el proyecto ‘OCONTSOLAR’ del programa H2020 del Consejo Europeo de Investigación.
Referencias
Antonello Venturino, Cristina Stoica Maniu, Sylvain Bertrand, Teodoro Alamo y Eduardo F. Camacho. ‘Multi-vehicle localization by distributed MHE over a sensor network with sporadic measurements: Further developments and experimental results’. Control Engineering Practice. 2023
Más información:
#CienciaDirecta, agencia de noticias de ciencia andaluza, financiada por la Consejería de Universidad, Investigación e Innovación de la Junta de Andalucía, con la colaboración de la Fundación Española para la Ciencia y la Tecnología-Ministerio de Ciencia e Innovación.
Teléfono: 958 63 71 99. Ext. 205
E-mail: comunicacion@fundaciondescubre.es
Documentación adicional
El catedrático de la Universidad de Sevilla Eduardo Fernández Camacho, autor del artículo.
Cada vehículo y sensor de la red colaboran en la estimación de la localización de los demás.
Últimas publicaciones

Esta investigación, liderada por la Estación Biológica de Doñana y realizada con mosquitos silvestres del sur de España, aporta nuevas claves sobre los factores que pueden influir en la capacidad de estos insectos para transmitir patógenos.
Investigadores del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos de la Universidad de Málaga (IMECH.UMA) han desarrollado un nuevo enfoque de inteligencia artificial que permite a los robots aprender no solo qué decisión tomar, sino también cuándo tomarla, incorporando el tiempo como un factor esencial en su proceso de aprendizaje.
Sigue leyendo
Un nuevo estudio de la Universidad de Granada analiza las consecuencias a largo plazo de la restricción del crecimiento extrauterino (EUGR), que afecta al 37% de los prematuros. Los investigadores han detectado posibles alteraciones estructurales cerebrales persistentes.
Sigue leyendo