
Diseñan un pie ‘inteligente’ para robots exploradores
Un equipo de investigación de las universidades de Sevilla y Cádiz ha diseñado una arquitectura de inteligencia artificial para patas robóticas que detecta el tipo de suelo y adapta la velocidad y ritmo en la pisada, como lo haría un humano. Los resultados del trabajo permitirán mejorar el funcionamiento de máquinas como las dedicadas a exploraciones de zonas de difícil acceso.
Un equipo de investigación de las universidades de Sevilla, Cádiz y Guanajuato de México ha desarrollado un pie ‘inteligente’ para robots exploradores basado en una red neuronal artificial que emula la forma de pensar natural y que se relaciona con su entorno mediante sensores sobre el terreno. El dispositivo adapta su movimiento según la estabilidad del suelo, como un humano y se puede aplicar a distintos tipos de robots.
Los expertos parten de estudios previos en inteligencia artificial basadas en redes neuronales pulsantes (SNN, Spiking Neural Networks). Éstas trabajan de una manera similar a como lo hacen las neuronas en el cerebro. Se comunican mediante estímulos eléctricos, compartiendo información para ordenar la ejecución de las distintas funciones en el organismo. Así, detallan en el artículo ‘Neuromorphic adaptive spiking CPG towards bio-inspired locomotion’ publicado en la revista Neurocomputing cómo han logrado que un robot modifique su movimiento dependiendo de la estabilidad y firmeza del suelo que pisan, como haría una persona.
Mediante unos sensores que miden la presión que ejerce el autómata al caminar, el sistema responde adaptando el movimiento a cada situación para no perder el equilibrio. “Hemos conseguido desarrollar el primer generador de patrones centrales bio-inspirado, es decir, que simula el pensamiento humano, y que provoca el cambio en los movimientos de cualquier robot, independientemente del número de patas que tenga. Se logra con tan solo un mecanismo de adaptación de poco consumo energético y económico”, indica a la Fundación Descubre el investigador de la Universidad de Sevilla, Juan Pedro Domínguez, autor del artículo.

El equipo de investigación de las universidades de Sevilla y Cádiz, responsable del artículo.
Como ocurre en el organismo, donde el cerebro recibe los estímulos externos y provoca una respuesta en el aparato locomotor, esta estructura cuenta con un generador de patrones centrales (CPG) que recibe la información del sensor colocado en las patas y da la orden de bajar la velocidad o el ritmo de paso para adecuarse a las nuevas circunstancias. Esto puede ser de especial utilidad en robots dedicados a rastrear o reconocer lugares de difícil acceso o en condiciones en las que el ser humano no puede llegar.
Robots que sienten
La ingeniería neuromórfica imita parte del cerebro mediante circuitos eléctricos y algoritmos. Son placas electrónicas que cuentan con un decodificador y un controlador que interpretan el estímulo, en este caso, la presión del terreno, y lo convierte en pulsos digitales. La red neuronal pulsante de este trabajo conecta a 5 poblaciones de 100 neuronas cada una, lo que facilita la aplicación del sistema en diferentes máquinas al ser más reducida que otras similares.
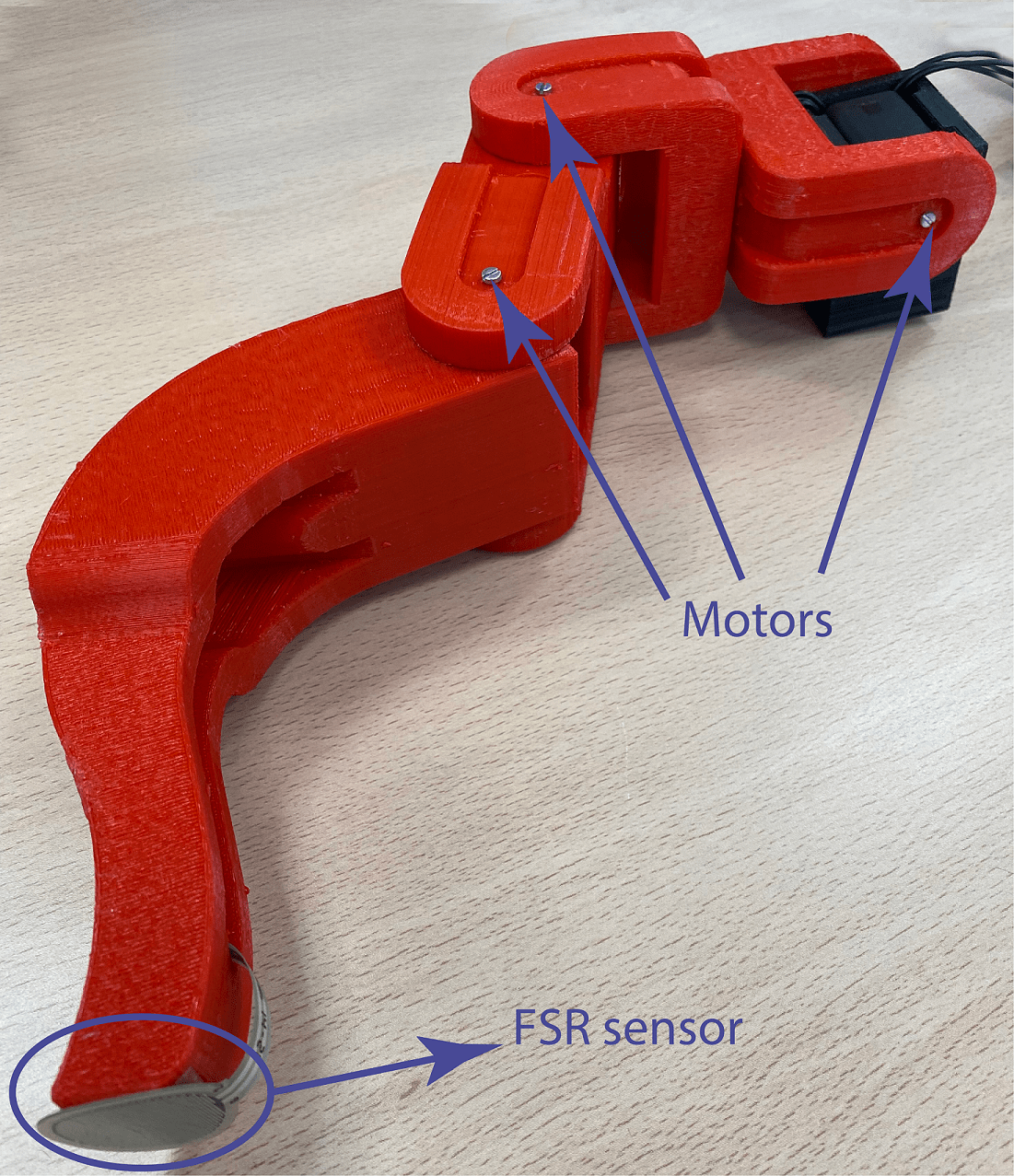
El dispositivo adapta su movimiento según la estabilidad del suelo mediante sensores.
Además, la red utilizada para el desarrollo de la arquitectura es la conocida como red neuronal pulsante, actualmente la más parecida a las biológicas, y que incorporan, a diferencia de otras utilizadas en inteligencia artificial, el concepto de tiempo. De esta manera, no se producen retardos en los cambios de frecuencia y ritmo, realizándose el proceso de una manera natural, como lo haría una persona.
Los expertos simularon, en un primer momento, la viabilidad del sistema en un software llamado Brian2, que modela la red partiendo de una serie de parámetros y predice lo que va a ocurrir según diferentes circunstancias. Así, si detecta un suelo blando, reconoce que puede haber peligro y da la orden para adaptar el movimiento a esa situación.
Tras confirmar su validez, traspasaron las pruebas a SpiNNaker, una placa de circuito impreso que se conecta al robot y contiene las poblaciones neuronales modeladas. De esta manera, el propio sistema actúa sin necesidad de ser controlado por nadie, sino que él mismo cuenta con la información necesaria para actuar según sea el caso.
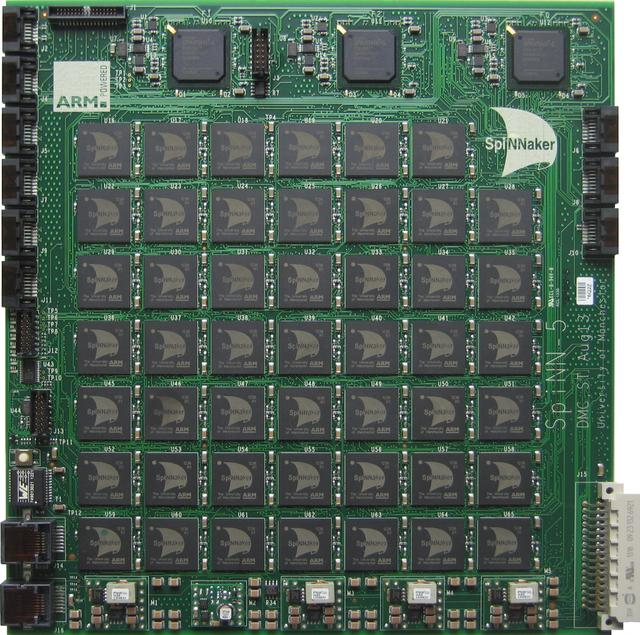
El generador de patrones centrales imita parte del cerebro mediante circuitos eléctricos y algoritmos.
Los ensayos se han realizado en una sola pata robótica en la que han confirmado la idoneidad del sistema para su implantación con el sensor de presión del terreno, pero también lo proponen para su uso con otro tipo de estímulos externos como podría ser la temperatura o un sonido. Así se podrían configurar los robots para que aumenten la velocidad de marcha ante una señal acústica, como podría ser una sirena, o ante una fuente de calor.
Actualmente, trabajan en el montaje del sistema en robots reales de distinta morfología, desde bípedos a hexápodos. Además, el estudio abre la puerta para que el sistema cuente con la opción de ir aprendiendo de su propia experiencia, una línea conocida como Deep learning o aprendizaje automático. Es decir, en el supuesto de algún fallo, la red neuronal asimila el error y propondría otra actuación si volviese a presentarse el mismo problema.
La investigación se ha financiado mediante los proyectos ‘Percepción y cognición neuromórfica para actuación robótica de alta velocidad’ y ‘Arquitecturas Memristivas Pulsantes para Aprender a Aprender’ del Ministerio de Ciencia e Innovación y ‘TIDE-Red Atlántica para el Desarrollo del Turismo Marítimo Histórico’, del programa Interreg de la Unión Europea.
Referencias
Pablo López Osorio, Alberto Patiño Saucedo, Juan Pedro Domínguez Morales, Horacio Rostro González y Fernando Pérez Peña. ‘Neuromorphic adaptive spiking CPG towards bio-inspired locomotion’. Neurocomputing. 2022
Más información:
#CienciaDirecta, agencia de noticias de ciencia andaluza, financiada por la Consejería de Universidad, Investigación e Innovación de la Junta de Andalucía, con la colaboración de la Fundación Española para la Ciencia y la Tecnología-Ministerio de Ciencia e Innovación.
Teléfono: 958 63 71 99. Extensión 205
Documentación adicional
Equipo de investigación de las universidades de Sevilla y Cádiz, responsable del artículo
Últimas publicaciones

El trabajo, liderado por el Instituto de Astrofísica de Andalucía (IAA-CSIC), ofrece una nueva reconstrucción física del megaestallido del cometa que sorprendió al mundo en 2007. Se trata, además, del primer estudio que presenta una recopilación completa de todos los estallidos documentados de 17P/Holmes desde su descubrimiento en 1892.
Sigue leyendo
El estudio del Instituto de Agricultura Sostenible y del Instituto de la Grasa analiza la conservación de los carotenoides, pigmentos naturales con capacidad antioxidante que se degradan durante el proceso de elaboración del pan. Los resultados indican la relevancia de combinar variedades con mayor presencia de este compuesto en forma esterificada junto con una mayor optimización tecnológica del horneado.
Sigue leyendo
Este estudio, realizado por investigadores del grupo Hormonas y Cáncer del Instituto Maimónides de Investigación Biomédica de Córdoba (IMIBIC) y de la Universidad de Córdoba, abre la puerta a tratamientos más personalizados para pacientes con tumores poco frecuentes que actualmente cuentan con pocas opciones terapéuticas.
Sigue leyendo