
El módulo Philae de Rosetta aterriza por fin en el cometa 67P
Fuente: SINC
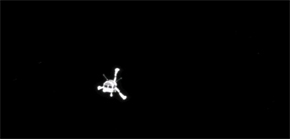
Imagen real de Philae abandonando Rosetta para dirigirse a la superficie del cometa 67P/ ESA
La misión Rosetta de la Agencia Espacial Europea (ESA) ha aterrizado su robot Philae en un cometa, la primera vez en la historia que se logra una hazaña así. Después de una tensa espera durante el descenso de siete horas a la superficie del cometa 67P / Churyumov-Gerasimenko, la señal que confirmó el éxito del aterrizaje ha llegado a la Tierra a las 17:03h (hora peninsular española).
En realidad el acontecimiento del ‘acometizaje’ se ha producido media hora antes del anuncio, pero como las señales de radio tardan 28 minutos y 20 segundos en recorrer los más de 500 millones de kilómetros que separan la Tierra del transmisor de Rosetta, a donde llegan los datos de Philae, los científicos han tenido que contener la emoción durante un tiempo.
Ahora están satisfechos, aunque han detectado un problema, cuyas consecuencia analizarán en la próximas horas: los arpones de Philae no se han disparado según lo previsto, por lo que el robot está anclado de forma menos segura que la calculada por los ingenieros. Tan solo está sujeto con tornillos y la débil fuerza de la gravedad.
En cualquier caso la confirmación del ‘cometizaje’ fue transmitida a través del orbitador Rosetta a la Tierra y llegó simultáneamente a la estación terrestre de la ESA en Malargüe, Argentina, y la estación que tiene la NASA en Robledo de Chavela, en Madrid.
La señal fue confirmada de inmediato en el Centro de Operaciones Espaciales de la ESA (ESOC) en Darmstadt y el Centro de Control del lander o ‘aterrizador’ (DLR) en Colonia, ambos en Alemania. Los primeros datos de los instrumentos también se transmitieron al Centro de Navegación, Operaciones y Ciencia de Philae de la Agencia Espacial CNES de Francia en Toulouse.
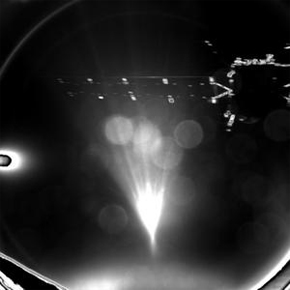
Philae justo después de la separación. / ESA/Rosetta/Philae/CIVA
«Nuestra ambiciosa misión Rosetta se ha asegurado un lugar en la historia; no sólo es la primera en encontrarse y orbitar un cometa, sino también la primera en poner un módulo de aterrizaje a la superficie de un cometa», señala Jean-Jacques Dordain, director General de la ESA.
«Después de más de 10 años viajando por el espacio, ahora estamos haciendo el mejor análisis científico de uno de los más antiguos restos de nuestro sistema solar», añade Álvaro Giménez, director de Ciencia y Exploración Robótica de la ESA.
Por su parte, Stephan Ulamec, coordinador del lander desde el centro alemán DLR, adelanta: «En las próximas horas vamos a conocer exactamente dónde y cómo hemos aterrizado, y vamos a empezar a obtener tanta ciencia como nos sea posible de la superficie de este mundo fascinante». De hecho los instrumentos del robos han empezado a recoger y transmitir datos desde que comenzó su descenso.
El lugar de aterrizaje, llamado Agilkia, se encuentra en la cabeza de este cometa de doble lóbulo y fue elegido sólo seis semanas después de la llegada de la sonda, que envió las imágenes y los datos recogidos a entre 30 y 100 km del objeto. Las fotografías pronto revelaron que 67P está lleno de rocas, acantilados y precipicios , así como pozos, con chorros de gas y polvo que fluyen desde la superficie.
La sonda Rosetta fue lanzada el 2 de marzo de 2004 y viajó 6.400 millones de kilómetros a través del sistema solar antes de llegar el 6 de agosto de 2014 alrededor de este cometa, al que seguirá a lo largo de todo el año que viene.
El trabajo de los instrumentos de Philae
Durante el descenso:
CIVA: Toma imágenes del orbitador Rosetta
CONSERT: Medidas de la gravedad, propiedades de la superficie y subsuperficie, que ayudan a reconstruir la trayectoria de caída.
ROLIS: Captura de imágenes de la zona de aterrizaje
ROMAP: Medidas del campo magnético
SESAME: Medidas de polvo y plasma
Encima del cometa:
CIVA: Imagen panorámica
MUPUS: Medida de la deceleración del arpón, propiedades de la superficie y subsuperficie
PTOLEMY & COSAC: Medidas del Gas
ROLIS: Imágenes cercanas a la superficie
ROMAP: Registro del campo magnético
SESAME: Propiedades de la superficie
SD2: Taladro
APXS: Determinación de la composición del entorno
Últimas publicaciones

El estudio se ha publicado en la revista científica MDPI Current Issues in Molecular Biology y plantea una alternativa innovadora para acelerar el diagnóstico de infecciones sanguíneas graves causadas por una bacteria considerada por la Organización Mundial de la Salud (OMS) como una de las principales amenazas sanitarias debido a su elevada resistencia a los antibióticos.
Sigue leyendo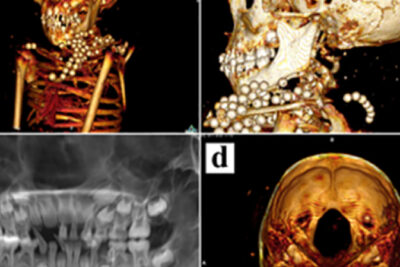
Un nuevo estudio publicado en la revista científica International Journal of Osteoarchaeology aporta importantes evidencias sobre la evolución de las […]
Sigue leyendo
Investigadores de la Universidad de Jaén han diseñado un sistema, formado por un equipo electrónico y un programa informático de código abierto, que mide la calidad de la señal y envía los datos al instante a la nube. El sistema, validado en condiciones reales, se adapta a instalaciones domésticas e industriales.
