
Aplican inteligencia artificial para mejorar la ejecución de tareas de robots en fábricas
Un equipo de investigación de la Universidad de Sevilla ha desarrollado un método matemático con el que consiguen que los robots se agrupen y diversifiquen los trabajos que deben realizar para optimizar los procesos industriales. De esta manera, se logra reducir la carga de computación y mejorar el rendimiento de los autómatas.
Fuente: Fundación Descubre
Un equipo de investigación de la Universidad de Sevilla, ubicado en el Parque Científico Tecnológico Cartuja, ha programado un algoritmo que permite a los robots coaligarse para acometer las tareas en menos tiempo. Con él las máquinas se van agrupando en función de su capacidad de trabajo y las tareas que deben ser resueltas, con lo que se crean equipos más fuertes y resolutivos. El nuevo método podría aplicarse en sistemas de trabajo continuo, como las líneas de producción de automóviles.
De la misma manera que las personas con ciertas capacidades son más aptas para determinadas tareas, los robots pueden destacar en trabajos concretos. Si además se debe realizar un proyecto para el que es necesario un equipo de expertos, pueden unirse para mejorar los resultados. Así, viendo el caso de la fabricación de automóviles, por ejemplo, las máquinas de pintura pueden agruparse para lograr resultados más uniformes y reducir el material empleado.
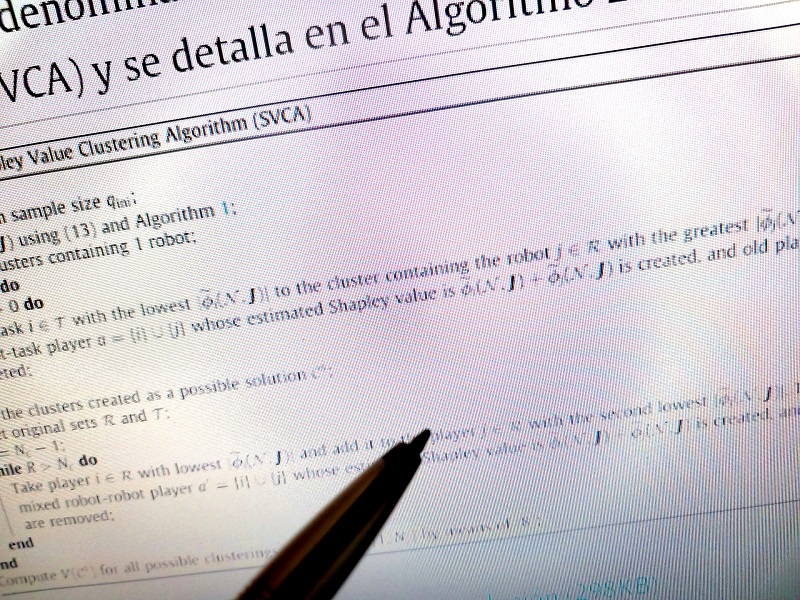
Partiendo de esta idea, los investigadores han analizado mediante una simulación el comportamiento de robots utilizados en distintos campos industriales. En el artículo ‘Multi-robot task allocation clustering based on game theory’ publicado en la revista Robotics and Autonomous Systems los expertos comparan distintas opciones y situaciones posibles para conocer cómo una flota robótica en una planta industrial puede mejorar las labores de mantenimiento con inteligencia artificial.

El investigador de la Universidad de Sevilla Eduardo Fernández Camacho, autor del artículo.
Para realizar la simulación de los diferentes resultados que se pueden obtener, los investigadores se basan en la teoría de juegos, una técnica matemática que busca analizar cómo las decisiones de un individuo afectan a las de los demás y cómo estas interacciones conducen a distintas soluciones. “En la simulación, los robots podían gestionar directamente los trabajos sin tener en cuenta los obstáculos con los que pudieran encontrarse y todos estaban equipados con la misma instrumentación. Por lo tanto, el tiempo para realizar una tarea solo dependía de la tarea misma”, indica a la Fundación Descubre el investigador de la Universidad de Sevilla Eduardo Fernández Camacho, autor del artículo.
Así, estimaron que cada robot y cada tarea es un jugador distinto que parte con las mismas cartas que el resto.
Distintas capacidades, distintos resultados
Cuando se dispone de un conjunto heterogéneo de robots y tareas es difícil conocer de forma general a priori cuál será la combinación más apropiada para resolver las tareas dadas con los recursos disponibles. Si el problema es pequeño, se puede resolver por la fuerza bruta, es decir, se calculan todas las combinaciones o asignaciones de robots y tareas y se escoge la mejor. Cuando el problema es grande, se produce una explosión combinacional en el número de opciones posibles, por lo que no es posible evaluarlas todas.
A pesar de partir desde la misma casilla de salida, los tiempos y las soluciones que aporta cada uno difieren por múltiples motivos. Así, los jugadores se irán agrupando según las respuestas que van dando a cada problema, creando equipos cada vez más fuertes.
Uno de los valores referenciales más usados son los algoritmos genéticos (GA), llamados así por su semejanza con esta rama de la ciencia. Parten de una cadena de variables (genes) organizados de manera aleatoria. Cada gen representa una posible solución. Posteriormente, los genes se entrecruzan y cambian, como si se tratara de un genoma real en evolución. Tras estos cálculos, puede analizarse con claridad qué composición es la mejor para su aplicación. Sin embargo, los resultados demuestran que el rendimiento del GA es limitado, ya que evalúa un subconjunto de posibles soluciones generando variaciones al azar en torno a las mejores soluciones que se van encontrando.
Shapley vs Mendel
Así, la referencia que se toma en este trabajo para realizar las agrupaciones de robots y tareas es el conocido como valor de Shapley, muy utilizado para resolver problemas de asignación de recursos, negociación y toma de decisiones en situaciones en las que es importante garantizar la equidad y la justicia. “El enfoque que usamos consiste en la aproximación del valor de Shapley de cada robot y tarea, lo que permite conocer su relevancia media dentro del problema. Esto se puede realizar en poco tiempo y permite identificar cuáles son los robots y las tareas claves del problema. A partir de esta identificación se descompone el problema inicial en otros más pequeños que son asignados a subconjuntos de robots, lo que también permite acelerar la solución del mismo”, añade el investigador.
La referencia que se toma para realizar las agrupaciones de robots y tareas es el conocido como valor de Shapley, muy utilizado para resolver problemas de asignación de recursos, negociación y toma de decisiones.
Además, el algoritmo que proponen puede llegar a gestionar centenares de agentes. Los resultados dependen de los tiempos requeridos para la realización de las tareas. Sin embargo, el método permite agregar otras técnicas que los reduzcan ya que se puede calcular cada acción de manera independiente y paralela. Las técnicas de aprendizaje automático podrían aplicarse en futuros trabajos para mejorar la aplicabilidad del método y poder incluir a miles de agentes en el proceso.
La investigación se ha financiado mediante el proyecto ‘OCONTSOLAR’ del programa H2020 del Consejo Europeo de Investigación.
Referencias
Javier G. Martin, Francisco Javier Muros, José María Maestre y Eduardo F. Camacho. ‘Multi-robot task allocation clustering based on game theory’. Robotics and Autonomous Systems. 2023.
Más información:
Reportaje de esta nota de prensa: Robots que juegan en equipo
#CienciaDirecta, agencia de noticias de ciencia andaluza, financiada por la Consejería de Universidad, Investigación e Innovación de la Junta de Andalucía, con la colaboración de la Fundación Española para la Ciencia y la Tecnología-Ministerio de Ciencia e Innovación.
Teléfono: 958 63 71 99. Ext. 205
E-mail: comunicacion@fundaciondescubre.es
Documentación adicional
Últimas publicaciones
Un equipo de investigación de la Universidad de Málaga ha diseñado una estrategia de control para motores utilizados en movilidad eléctrica y aeronáutica. Esta técnica mejora la calidad de la corriente y predice el funcionamiento más adecuado, optimizando su eficiencia de consumo y respondiendo ante posibles fallos.

La comunidad tiene la oportunidad de realizar una evaluación previa este domingo para estimar la logística y seguridad necesarias de cara al evento astronómico que será visible en 115 localidades de Almería, Cádiz, Granada y Málaga.
Sigue leyendo
El programa de ocio estival de la Fundación Descubre estará presente en localidades de las provincias de Huelva, Sevilla, Málaga, Granada, Jaén y Almería.
Sigue leyendo