
Desarrollan un nuevo sistema de aterrizaje de helicópteros y drones no tripulados en plataformas móviles y sin GPS
Un grupo de investigadores de la Universidad de Sevilla, en colaboración con el Centro Avanzado de Tecnologías Aeroespaciales, ha diseñado un método que permite tomar tierra a vehículos aéreos no tripulados en superficies en movimiento sin necesidad de utilizar un dispositivo de navegación por satélite. Combinado con el aterrizaje de precisión, se puede aplicar para labores de vigilancia, seguridad o auxilio de personas.
Un equipo de investigadores de la Universidad de Sevilla, en colaboración con el Centro Avanzado de Tecnologías Aeroespaciales, ha desarrollado un sistema de aterrizaje de vehículos aéreos no tripulados (UAVs), como helicópteros y drones con múltiples rotores, en plataformas móviles, sin emplear navegación por satélite. Hasta ahora no ha existido una tecnología que permita que estos aparatos puedan tomar tierra en este tipo de superficies, de forma automática y sin usar un dispositivo de posicionamiento preciso. La seguridad, la observación o el auxilio de personas son algunos de los campos donde se puede implementar este método, que podría comercializarse en menos de un año.

Aterrizaje automático de un helicóptero no tripulado en plataforma móvil, en la instalación ATLAS de la Fundación Andaluza para el Desarrollo Aeroespacial.
El catedrático de Robótica de la Universidad de Sevilla, Aníbal Ollero, explica a la Fundación Descubre que se trata de un problema no resuelto: aterrizar vehículos aéreos no tripulados en un sitio relativamente pequeño de forma automática y con total seguridad, cuando es difícil o imposible hacerlo manualmente, aunque se esté moviendo de forma ostensible. Una plataforma marina con un espacio reducido en una embarcación es uno de los supuestos. “Si no se conoce el movimiento, como es el caso, hay que estimar de forma automática cómo es el movimiento de la plataforma con respecto al vehículo que va a aterrizar”, añade Ollero.
El objetivo es aterrizar de manera segura en plataformas móviles, sin utilizar un sistema global de navegación por satélite (GNSS) en ninguna etapa de la maniobra de aterrizaje, y con una precisión de un centímetro y un alto nivel de robustez. La posición relativa y la velocidad entre el vehículo aéreo y la plataforma de aterrizaje se calculan desde los ángulos de un cable que conecta físicamente el UAV y la plataforma de aterrizaje. El uso de este enlace también incorpora una serie de beneficios adicionales, como aumentar la precisión en el control de la altitud del UAV o suministrar combustible. Asimismo, el cable facilita el centrado del vehículo aéreo, justo encima de la posición de aterrizaje esperada, y aumenta su estabilidad después de entrar en contacto con la plataforma de aterrizaje. Además, el cable puede utilizarse también para suministrar energía al vehículo aéreo no tripulado.
Los investigadores realizaron diversas pruebas en diferentes condiciones para medir su precisión y solidez, con un helicóptero no tripulado. Los resultados muestran que el sistema desarrollado permitió el aterrizaje de precisión utilizando solo sensores locales y que el helicóptero podría posarse en la plataforma de aterrizaje en múltiples trayectorias a diferentes velocidades.
Según el experto, buscaban desarrollar técnicas de control y de estimación, que permitan posarse de forma automática, a un vehículo aéreo no tripulado de ala rotatoria, encima de una plataforma que se está moviendo, tanto en zonas marinas como terrestres. Aunque el proyecto se desarrolló experimentalmente en estos últimos espacios, se podría aplicar en embarcaciones sobre superficies de agua.
Con estos métodos, una embarcación podría disponer de una plataforma para que pudiera descender y estacionar, en un espacio muy reducido, un helicóptero o un dron multi-rotor que realice, por ejemplo, tareas de observación, vigilancia o detección de posibles náufragos. Incluso podría usarse para transporte de pequeños paquetes. “En una de las tecnologías que hemos desarrollado, es posible que la plataforma esté unida con un cable a la embarcación y al vehículo aéreo no tripulado. De esa manera, utilizando ese cable, también se podría alimentar durante un tiempo de energía al sistema que está volando, sin que tenga que aterrizar para recargarle la batería”, indica el profesor de la Universidad de Sevilla.

El investigador de la US, Aníbal Ollero.
La tecnología ya es una realidad, aunque todavía no se ha explotado comercialmente. “Aquí no se ha desarrollado un único sistema o prototipo, sino una tecnología y es posible explotarla desde diferentes formas”, añade Aníbal Ollero. El método ha sido objeto de diversas publicaciones entre las que se encuentra ‘A Precise and GNSS-Free Landing System on Moving Platforms for Rotary-Wing UAVs’, que aparece en la revista Sensors.
Proyecto EC-SAFEMOBIL
El estudio se engloba dentro del proyecto EC-SAFEMOBIL. Se estudiaron tanto vehículos aéreos de ala rotatoria, como por ejemplo helicópteros, y también de ala fija, es decir, aviones. En este sentido, en un futuro podría lograrse que aeronaves más grandes se posaran sobre una superficie móvil encima de plataformas terrestres, evitando con ello tener que utilizar una pista fija.
Según Ollero, desde el punto de vista de su posible aplicación industrial no hace falta demasiado tiempo: “Podríamos estar hablando de meses. Se requieren algunos dispositivos que permitan adaptarlo a las plataformas en las que vayan a aterrizar. Pero sí, creo que podríamos decir que en menos de un año podrían generarse unos sistemas comerciales”.
El proyecto EC-SAFEMOBIL, del que el Aníbal Ollero fue coordinador y en el que trabajó también el profesor de la Universidad Pablo de Olavide, Manuel Béjar, forma parte del Séptimo Programa Marco de la Comisión Europea. Para llevarlo a cabo se creó un consorcio en el que participaron además del Centro Avanzado de Tecnologías Aeroespaciales (CATEC) y la Universidad de Sevilla, otras instituciones como el Centro Aeroespacial Alemán (DLR), Airbus Defence and Space, el grupo empresarial angloitaliano Leonardo, anteriormente llamado Finmeccanica, la compañía italiana Euroimpianti, la española Indra, y grupos de investigación de las universidades de Duisburg-Essen (Alemania) y Zagreb (Croacia).
Referencias
Francisco Alarcón, Manuel García, Iván Maza, Antidio Viguria, Aníbal Ollero: ‘A Precise and GNSS-Free Landing System on Moving Platforms for Rotary-Wing UAVs’. Sensors. 2019.
L.A. Sandino, M. Bejar, K. Kondak and A. Ollero: ‘Multi-Sensor Data Fusion for a Tethered Unmanned Helicopter Using a Square-Root Unscented Kalman Filter’, Unmanned Systems, Vol. 4, nº 04, pp 273-287. Editor World Scientific Publishing Company. 2016.
Más información:
FUNDACIÓN DESCUBRE
Departamento de Comunicación
Teléfono: 954239422
Últimas publicaciones
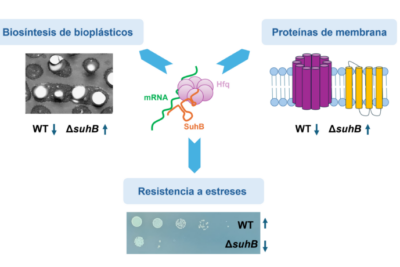
La investigación ha sido desarrollada por científicos de la Universidad Pablo de Olavide y revela el papel del pequeño ARN denominado SuhB en la supervivencia de Sphingopyxis granuli TFA, una bacteria capaz de degradar contaminantes. El trabajo, publicada en Microbiological Research, abre nuevas vías para mejorar procesos de biorremediación y biotecnología sostenible.
Sigue leyendo
Una investigación con 190 deportistas de alta competición y en la que participa la Universidad de Málaga revela que la respuesta del cortisol al despertar se triplica en las mañanas de partido para preparar al organismo ante la exigencia competitiva. Esta y otras hormonas influyen en el rendimiento de los jugadores, les hacen más proclives a sufrir lesiones y dificultan su capacidad para responder durante el juego.

Un equipo de investigación internacional liderado por el Instituto de Recursos Naturales y Agrobiología de Sevilla (IRNAS-CSIC) ha descrito cómo se forman las primeras comunidades microbianas en los tubos de lava generados tras la erupción de La Palma en 2021. El estudio define qué organismos llegan primero, cómo se adaptan a las condiciones y qué papel desempeñan en la recuperación del entorno.
