
Desarrollan un simulador gratuito para navegación de robots móviles
Un equipo de investigación de la Universidad de Almería ha creado un nuevo sistema que reduce los costes y los tiempos en la producción de prototipos de vehículos autónomos. En él se incluyen diversas posibilidades de configuración como la localización simultánea, la navegación independiente y el control de dirección.
Fuente: Fundación Descubre
Un equipo de investigación de la Universidad de Almería ha creado un simulador para acelerar el proceso de desarrollo en la comercialización de nuevos robots. Con una mayor capacidad para incluir parámetros y variables diversas, el sistema se propone como una solución mejorada para la investigación y desarrollo en robótica móvil y vehículos autónomos.
La plataforma se construye sobre código abierto y está disponible de manera gratuita para cualquiera que quiera utilizarlo en sus desarrollos e investigaciones en https://github.com/MRPT/mvsim. Los expertos definen la arquitectura, el modelo de diseño utilizado y las funcionalidades del programa en el artículo ‘MultiVehicle Simulator (MVSim): Lightweight dynamics simulator for multiagents and mobile robotics research’ publicado en la revista SoftwareX.
Además, el sistema se soporta en cualquier sistema operativo, incluidos Windows e iOS, lo que permite aplicarlo en cualquier arquitectura existente. “La pluralidad de posibilidades del nuevo software proporciona a los investigadores y desarrolladores la capacidad de configurar cualquier escenario que pueda pensarse para la creación de vehículos autómatas o robots”, indica a la Fundación Descubre el investigador de la Universidad de Almería José Luis Blanco, autor del artículo.

Investigadores del departamento de Ingeniería Mecánica y Robótica de la Universidad de Almería.
Todas las pruebas realizadas mejoran los resultados de otros simuladores existentes en el mercado, lo que lo propone como la herramienta idónea para el análisis y diseño de robots móviles antes de trasladarlo a entornos reales. La variedad que permite el software supone la reducción de costes y tiempos en la fabricación de este tipo de vehículos y la ampliación de las posibilidades en los estudios y desarrollos de nuevas herramientas de control y gestión.
Crear situaciones para fabricar robots más eficientes
Denominado MVSim, el sistema replica las acciones de uno o más vehículos para observar sus movimientos, colisiones, analizar el rozamiento de las ruedas con el suelo y acoplar diferentes sensores o cámaras. Además, las simulaciones pueden realizarse en tiempo real o marcando otros tiempos definidos, acelerando el proceso para analizar las diferentes situaciones de una manera más rápida.
El simulador permite la creación de diferentes mundos, con mobiliario u obstáculos que se definen. También se configura el tipo de suelo o el tamaño de las ruedas para analizar la fricción que se produce, así como los distintos tipos de movimientos posibles.
El repositorio publicado incluye ejemplos de simulación, como la de varios robots actuando simultáneamente en un invernadero en los que pueden tener multitud de funciones como la fumigación o recolección.
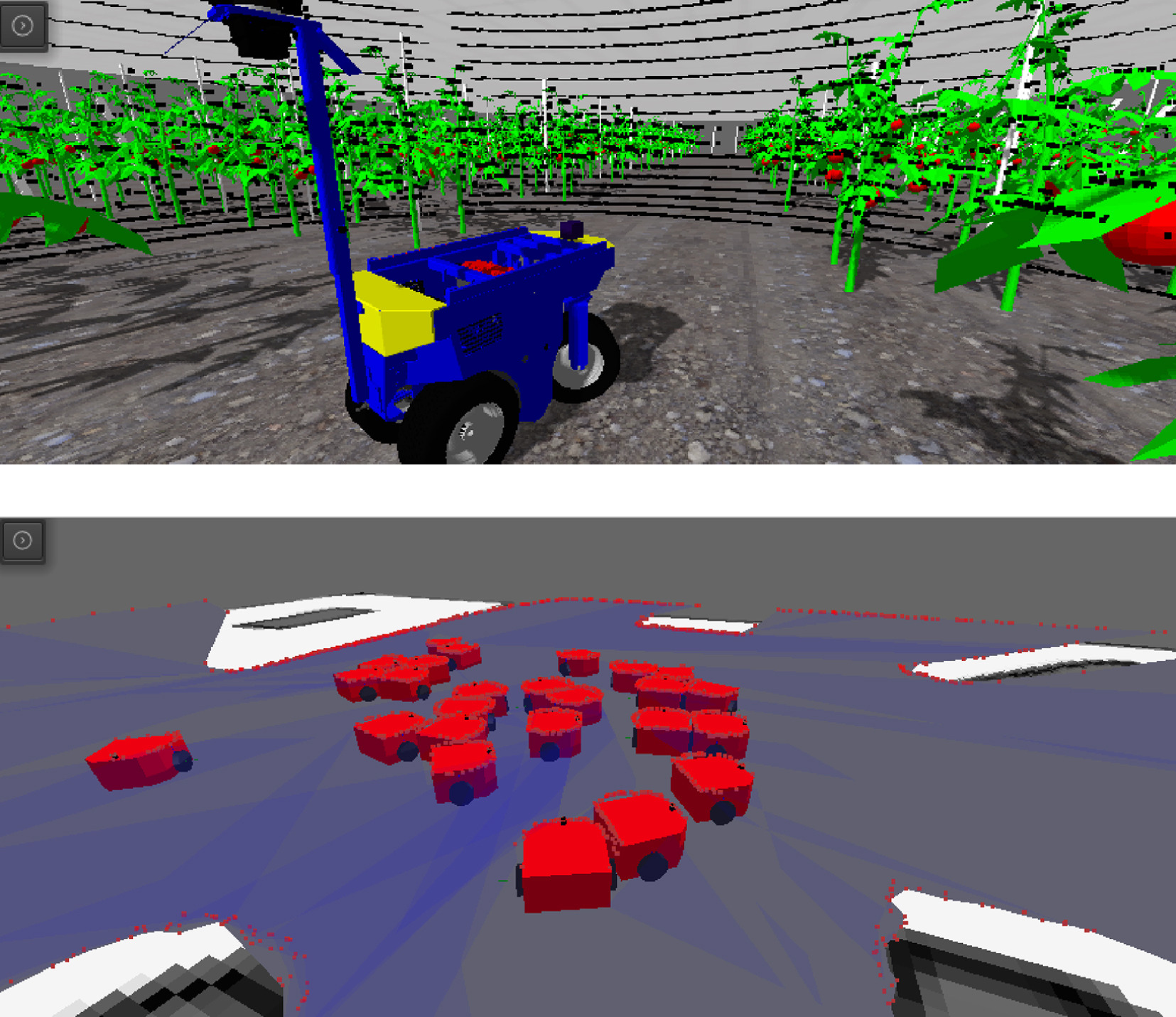
El simulador puede replicar funciones como la localización simultánea de vehículos, la navegación autónoma y el control de dirección.
En comparación con los simuladores existentes, MVSim define el escenario y el robot sin necesidad de mucho entrenamiento o esfuerzo, lo que reduce los tiempos de replicaciones y permite a estudiantes e investigadores obtener resultados con más exactitud y calidad. El equipo continúa sus trabajos en la mejora de los simuladores aplicados a robótica tanto a nivel computacional, gráfico y de cálculo de estimaciones.
El trabajo se ha financiado mediante los proyectos ‘Agricultural collaborative robot inside the IOT (AGRICOBIOT I)’ del plan propio de la Universidad de Almería y ‘Agricultural collaborative robot inside the IOT (AGRICOBIOT II)’ de la Consejería de Universidad, Investigación e Innovación de la Junta de Andalucía, junto a la Oficina de Programas de Código Abierto de Google (OSPO).
Reportaje sobre esta nota de prensa: El simulador de robots más real
Referencias
José Luis Blanco Claraco, Borys Tymchenko, Francisco José Mañas Alvarez, Fernando Cañadas Aránega, Ángel López Gázquez y José Carlos Moreno. ‘MultiVehicle Simulator (MVSim): Lightweight dynamics simulator for multiagents and mobile robotics research’. SoftwareX. 2023
Más información:
#CienciaDirecta, agencia de noticias de ciencia andaluza, financiada por la Consejería de Universidad, Investigación e Innovación de la Junta de Andalucía, con la colaboración de la Fundación Española para la Ciencia y la Tecnología-Ministerio de Ciencia e Innovación.
Teléfono: 663 920 093
E-mail: comunicacion@fundaciondescubre.es
Documentación adicional
Últimas publicaciones
Un equipo de investigación de la Universidad de Málaga ha diseñado una estrategia de control para motores utilizados en movilidad eléctrica y aeronáutica. Esta técnica mejora la calidad de la corriente y predice el funcionamiento más adecuado, optimizando su eficiencia de consumo y respondiendo ante posibles fallos.

La comunidad tiene la oportunidad de realizar una evaluación previa este domingo para estimar la logística y seguridad necesarias de cara al evento astronómico que será visible en 115 localidades de Almería, Cádiz, Granada y Málaga.
Sigue leyendo
El programa de ocio estival de la Fundación Descubre estará presente en localidades de las provincias de Huelva, Sevilla, Málaga, Granada, Jaén y Almería.
Sigue leyendo